Module suction cup
Compatible models: myCobot 320, myCobot Pro 630
product icon

Specifications
| name | Module suction cup |
|---|---|
| model | myCobotPro_suctionPump |
| Material | Nylon 7100 |
| Number of suction cups | 1/2/4 |
| Suction cup size | diameter 33mm |
| absorb weight | Maximum 1000g |
| Power source equipment | Suction and blowing integrated air compressor |
| service life | one year |
| a fixed way | screw fixed |
| control interface | I/O control |
| Use environment requirements | Temperature and pressure |
| Applicable equipment | ER myCobot 320 series, ER myCobot Pro 630 series |
Suction cup suction pump: used for adsorbing objects
Introduction
Suction cup suction pump is that the suction port is connected with the object to be adsorbed through suction cups, tubes and other components, and vacuumizes the suction cup, causing the internal air pressure to change from normal pressure to negative pressure. The pressure difference between the external atmospheric pressure and this negative pressure is used to achieve adsorption. The purpose of living objects.
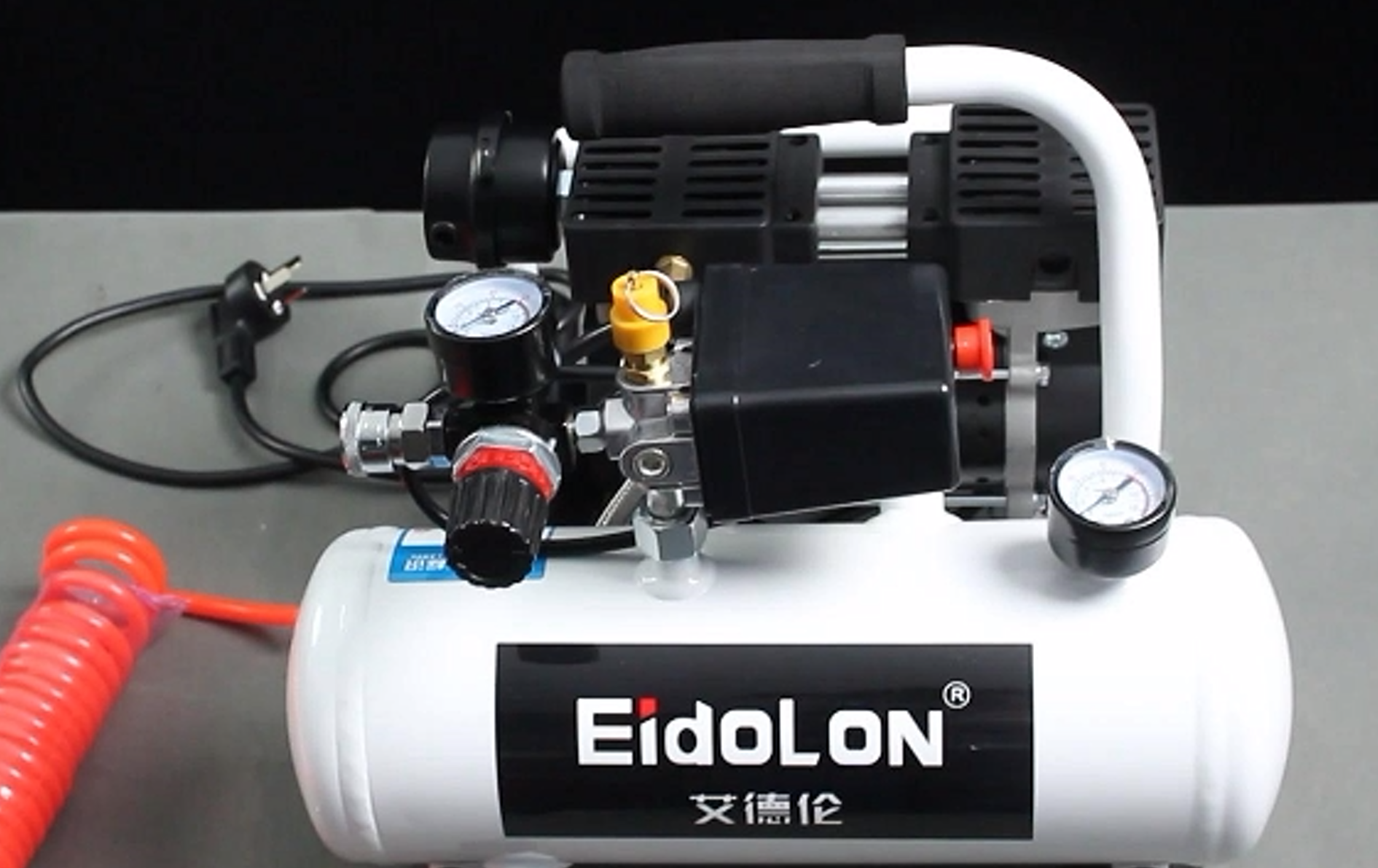
The overall structure is a multi-functional expandable suction cup, which can be installed up to 4; high-pressure resistant hose, which can be reused many times; an air compressor with suction and blowing integrated, which can be expanded to other functions.
working principle
Start the suction of the vacuum equipment to generate negative air pressure in the suction cup, so that the object to be lifted can be sucked firmly, and the object to be lifted can be started to be transported.
When the object to be lifted is transported to the destination, inflate it smoothly into the vacuum suction cup, so that the negative air pressure in the vacuum suction cup becomes zero or slightly positive air pressure, and the vacuum suction cup is separated from the object to be lifted, thus completing the lifting and conveying of heavy objects task.
Applicable objects : suitable for objects with flat surfaces
Appearance introduction
- Multifunctional expandable suction cups, can install up to 4

High pressure resistant hose, can be reused many times

Suction and blowing integrated air compressor, can expand other functions

Installed for use
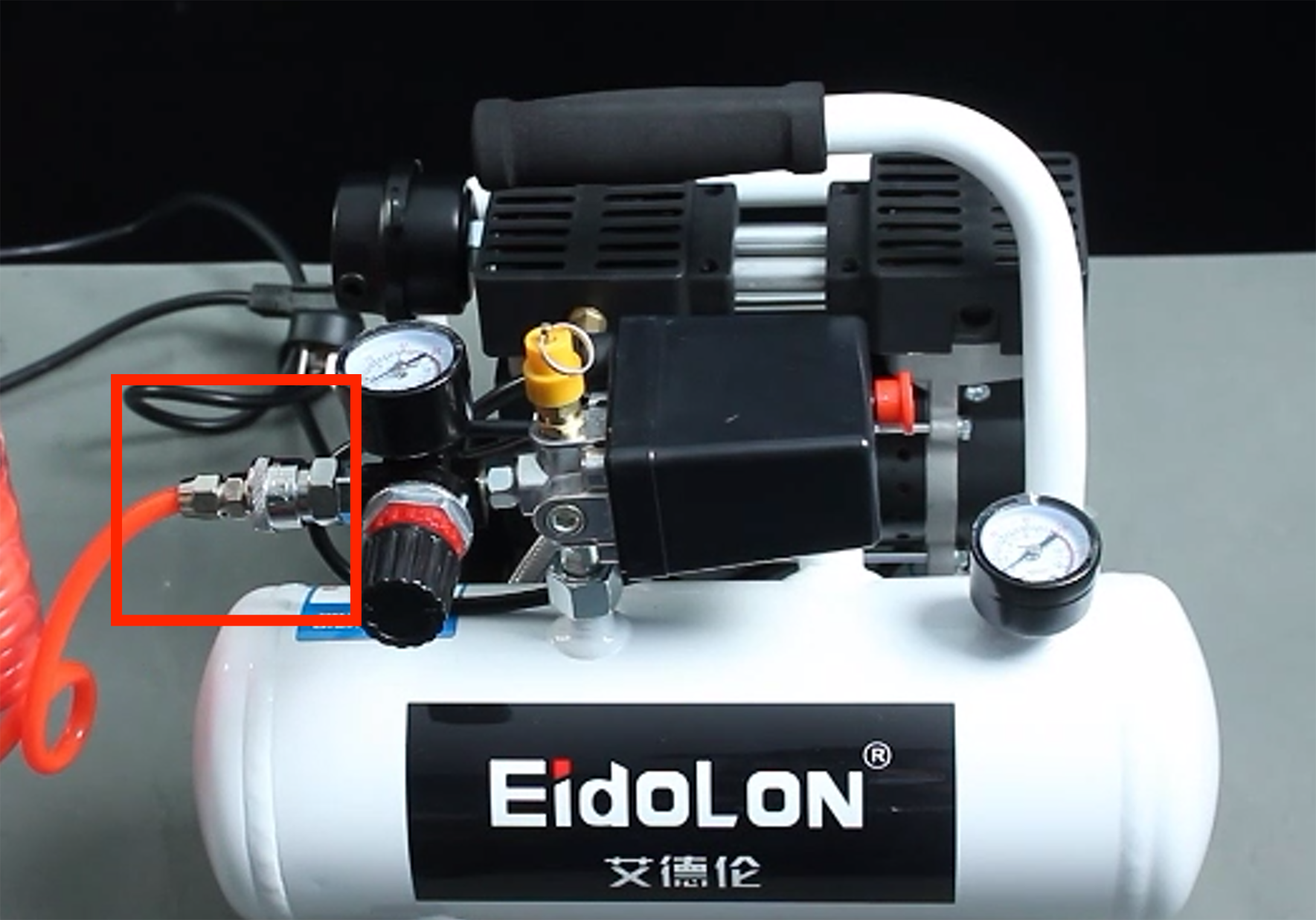
Required for use with an air compressor:
Insert the black plug into the plug;
insert the matching red hose into the socket on the machine:
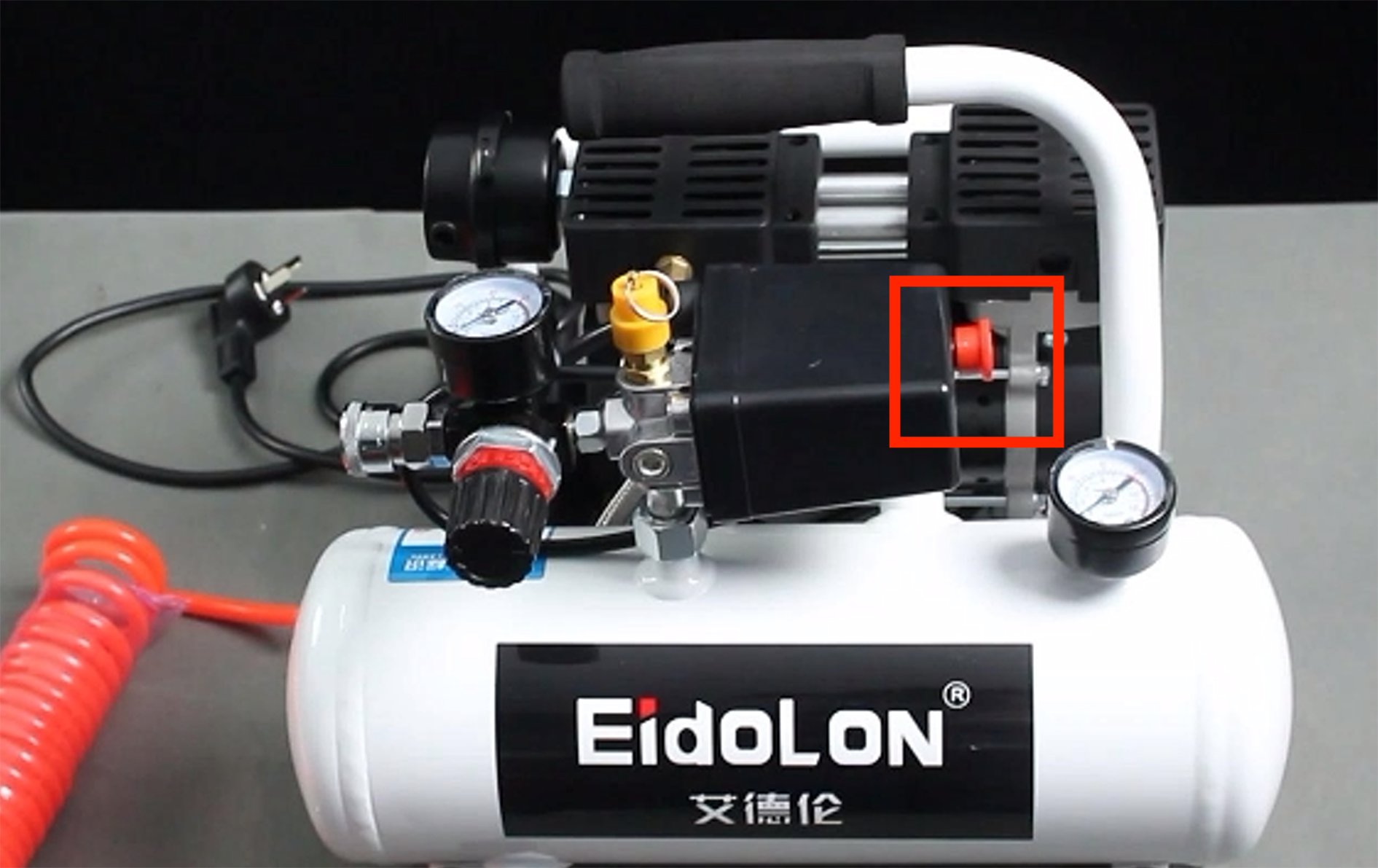
- The red button is the on/off switch, pulling it outwards turns it on, pressing it back turns the machine off:
Suction cup mounting:
You can view the installation instructions for the corresponding accessories in the video:
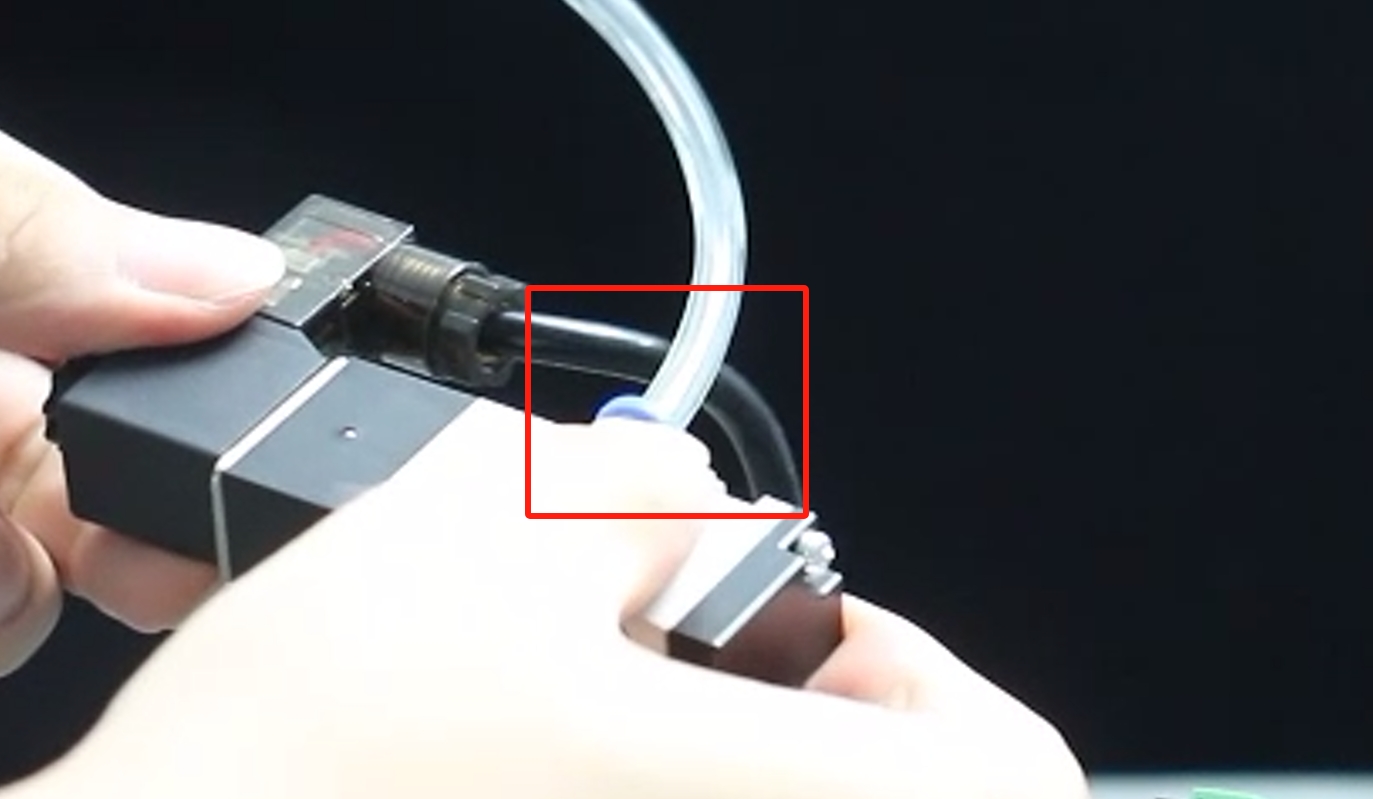
- Connect the other end of the air compressor red hose to the solenoid valve connection:
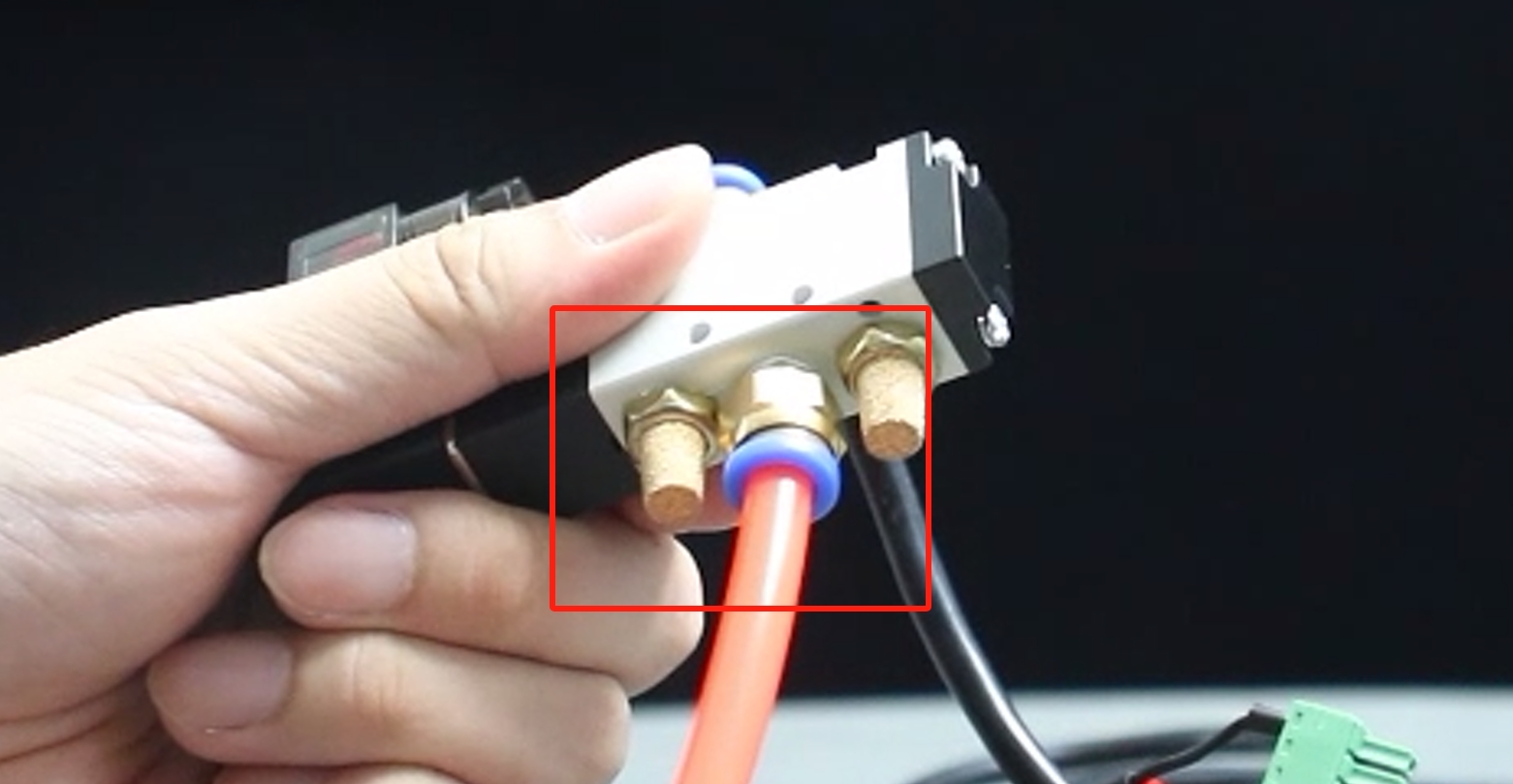
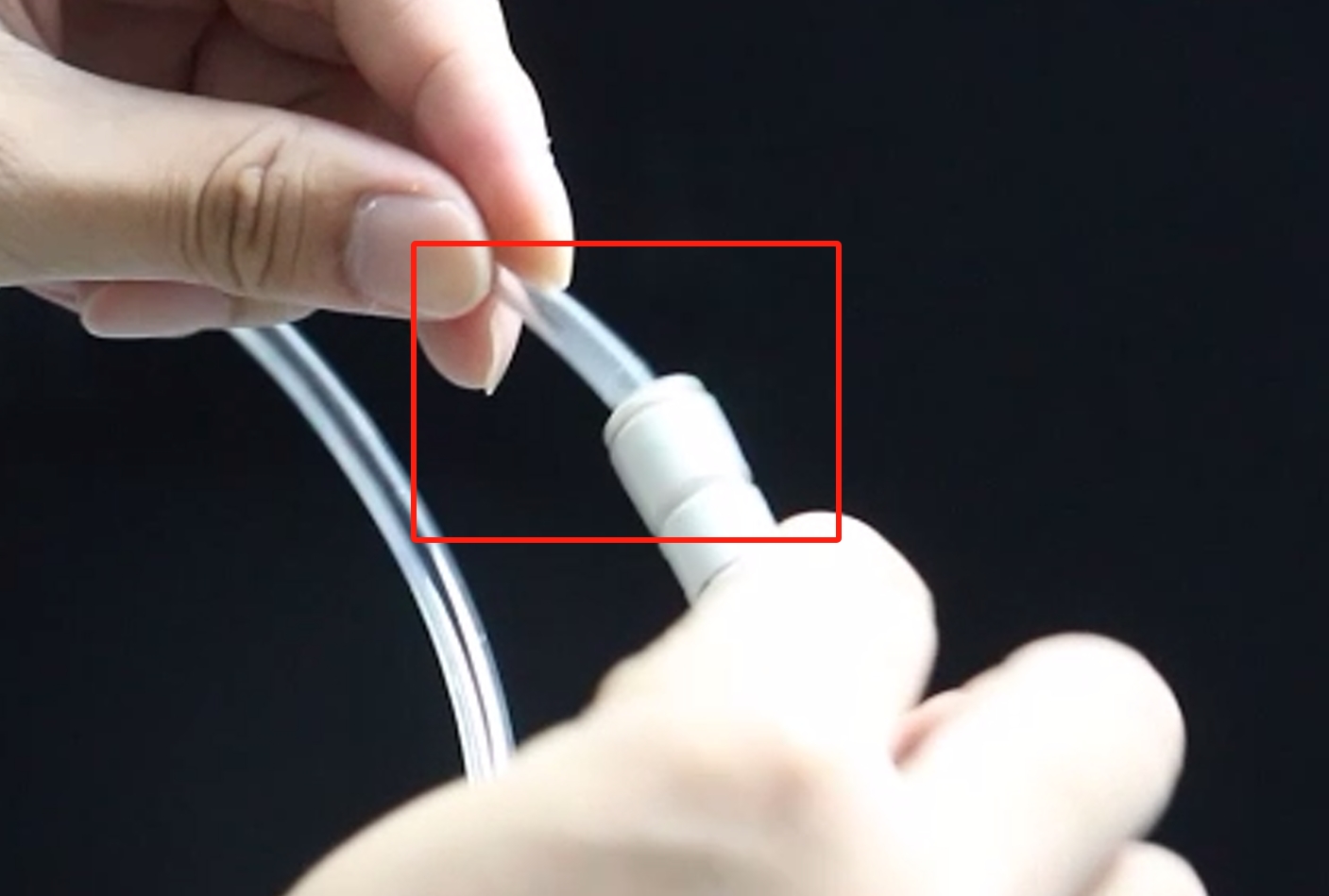
- Use the clear hose that comes with the modular suction cup to connect to the connection above the solenoid valve and to the hose branch of the modular suction cup:
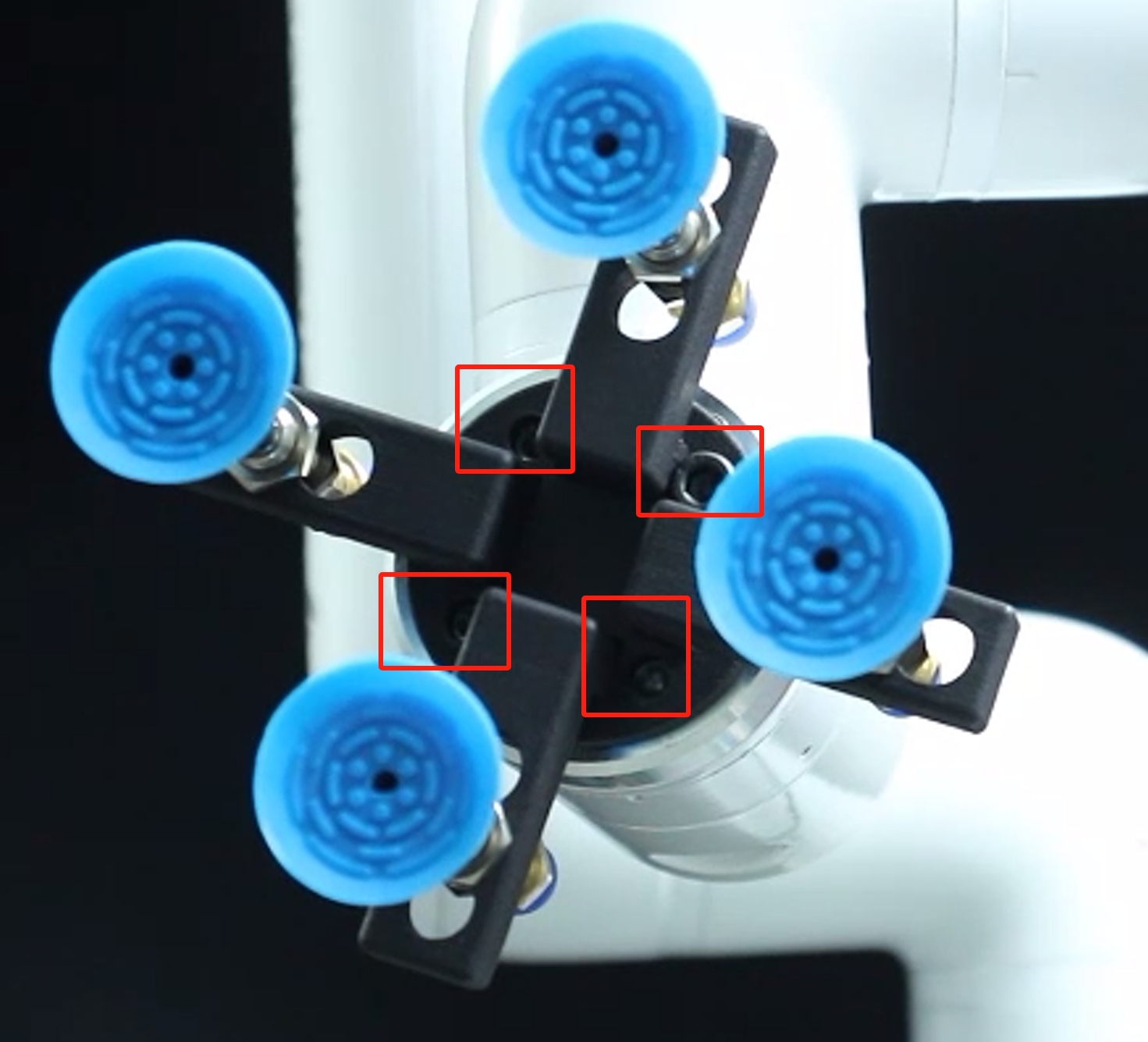
- Secure the module suction cup to the end of the robot arm with the matching screws:
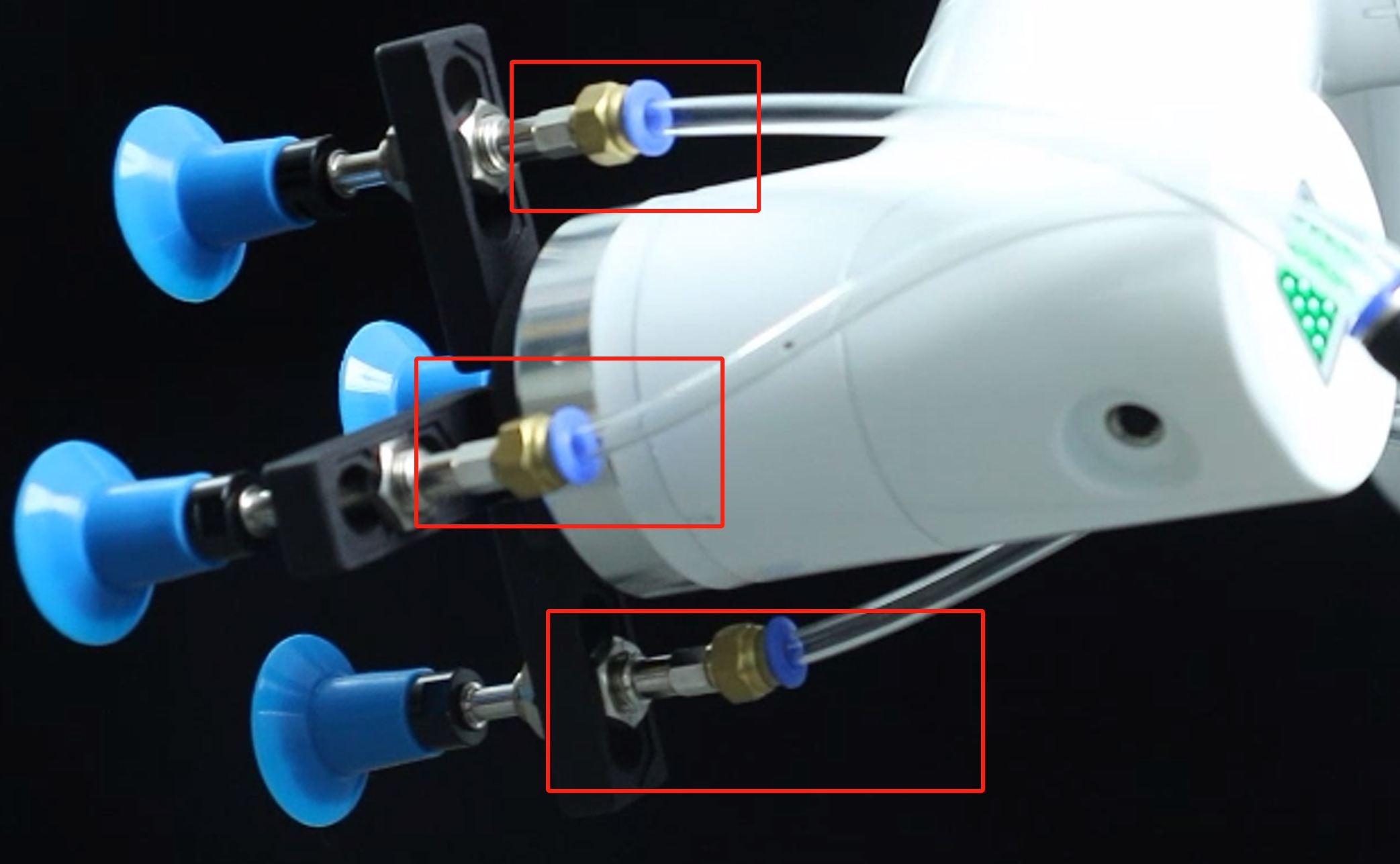
- Attach the hose branch to the modular suction cup:
- Connect the other end of the air compressor red hose to the solenoid valve connection:
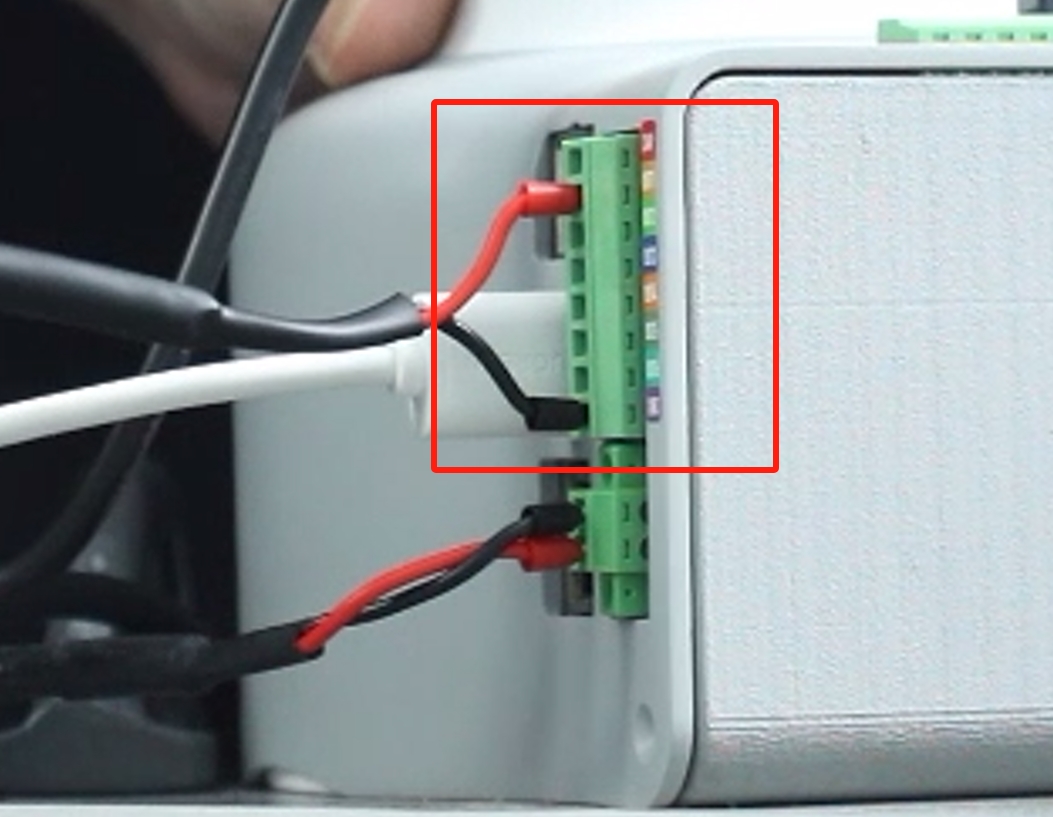
Electrical connection:
- Connect the black wire to the GND of the robot arm base, and the red wire to any one of OUT1~OUT6, and change the pin number of the subsequent programme according to the interface you choose, here we use OUT1:
- Connect the black wire to the GND of the robot arm base, and the red wire to any one of OUT1~OUT6, and change the pin number of the subsequent programme according to the interface you choose, here we use OUT1:
Software driver test:
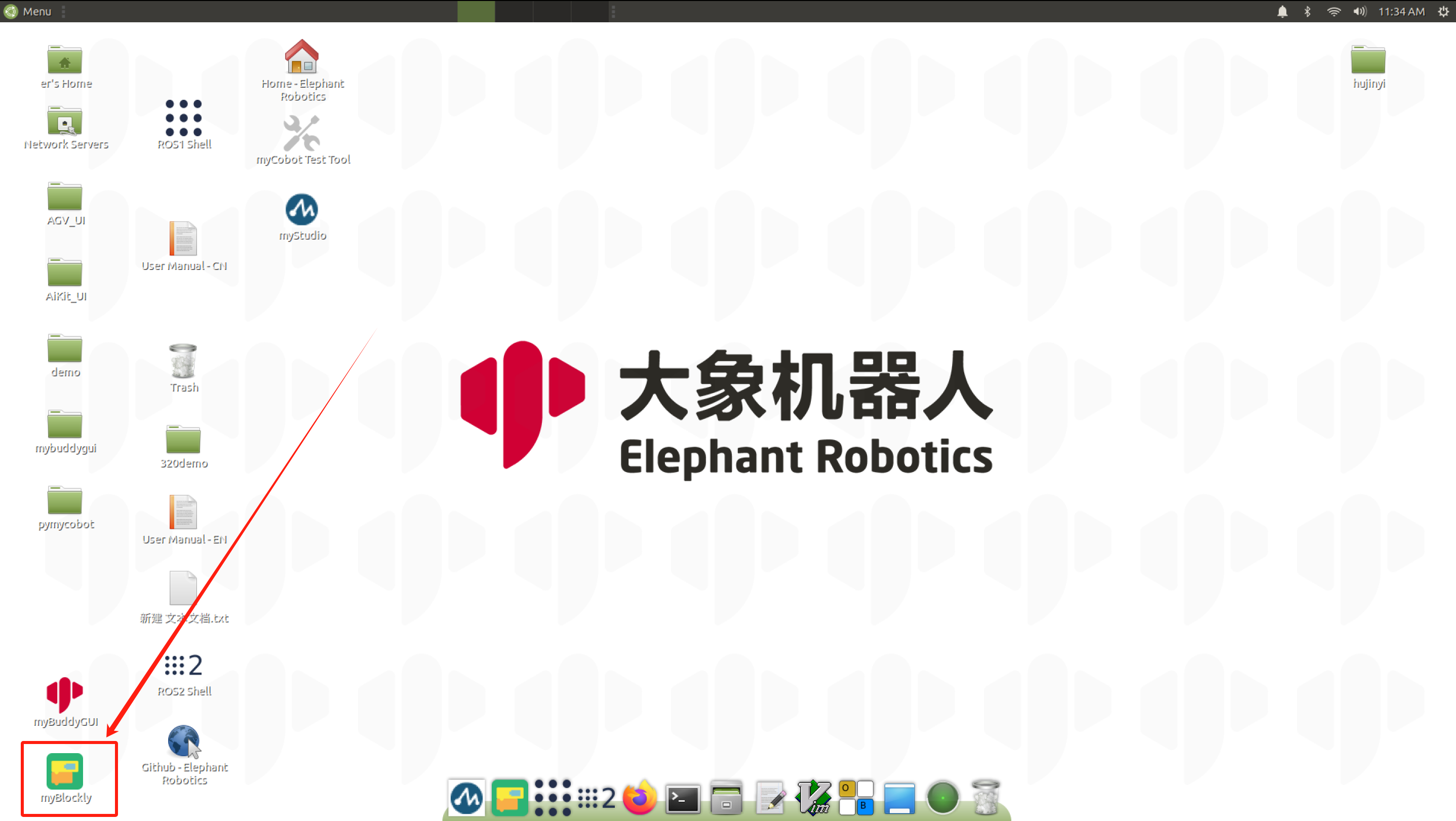
Test that the suction cup is available after installation, using myBlockly test myblockly 下载
- After confirming that the structural and electrical connections are complete, start the robot arm and open the myblockly software when the graphical interface appears.
- Modify the baud rate to 115200:

- Find
Basein the list on the left and select theSet Pin Outmodule: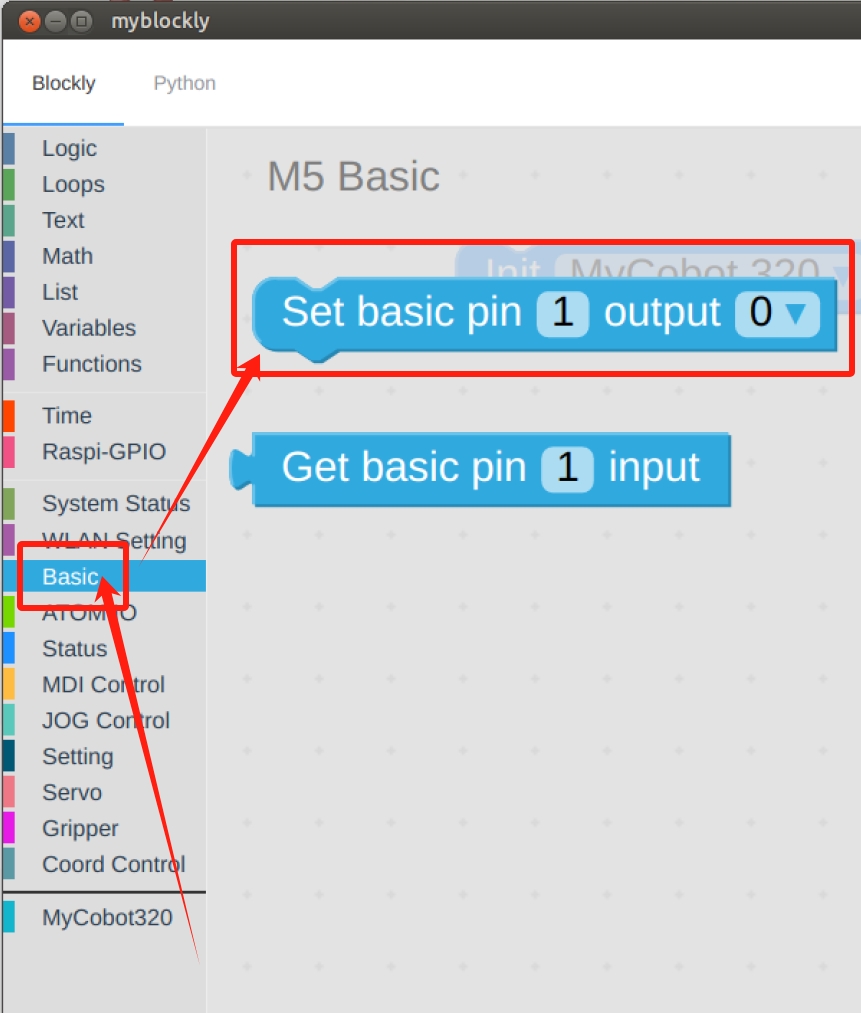
- Set
pin numberto1andoutputto0: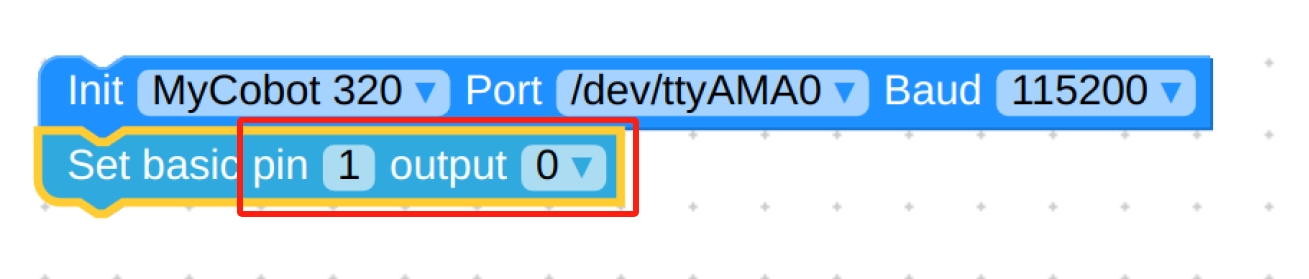
- Find
Timeand select theSleepmodule: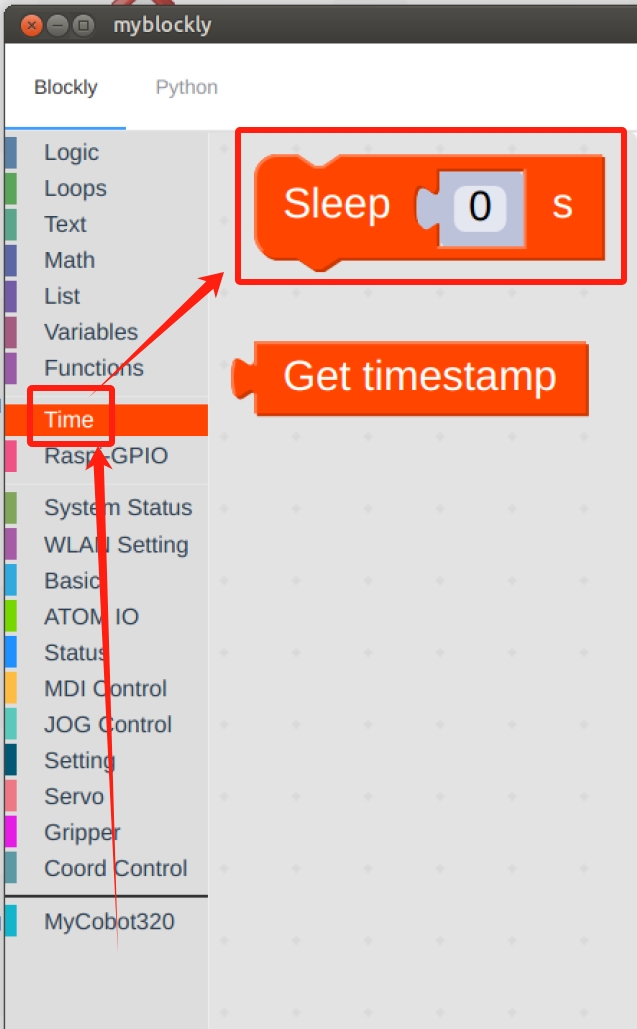
- Set the time as required, here set to
2s: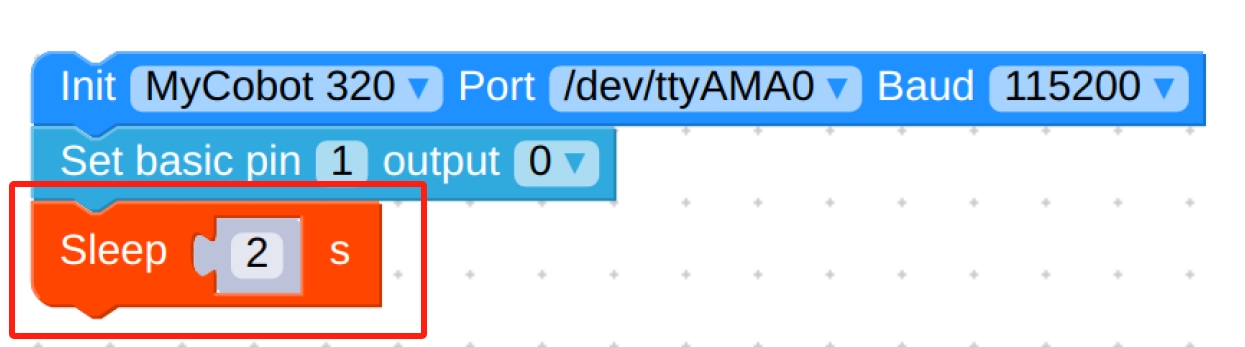
- Repeat the above steps for the final setup as follows:
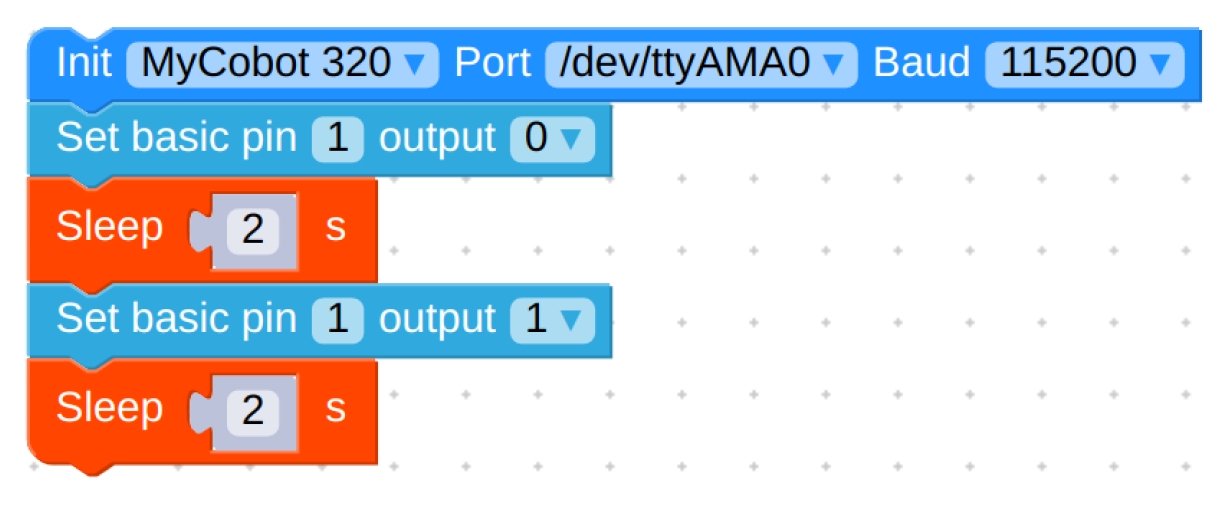
- Hold the suction cup against the object and click the green Run button in the upper right corner to allow the suction cup to hold the object for 2s before releasing it.
- After confirming that the structural and electrical connections are complete, start the robot arm and open the myblockly software when the graphical interface appears.
Programming Development:
Programming Development for Suckers using python python 环境下载
Create a new python file:
Right click on the desired file path to create a new python file: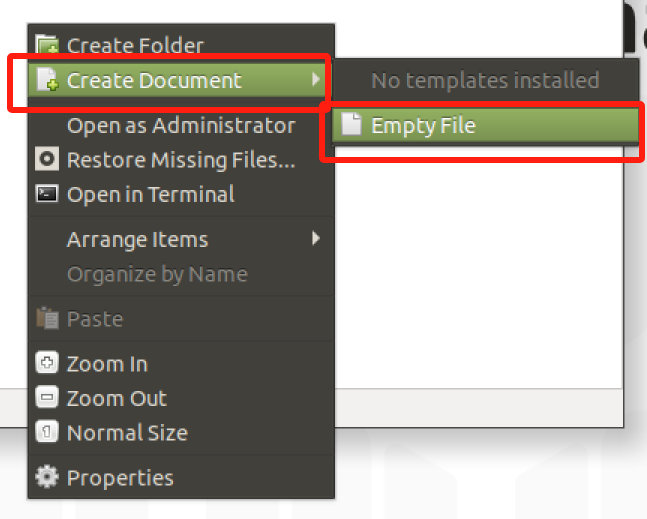
The name of the file can be changed as needed
Perform functional programming:
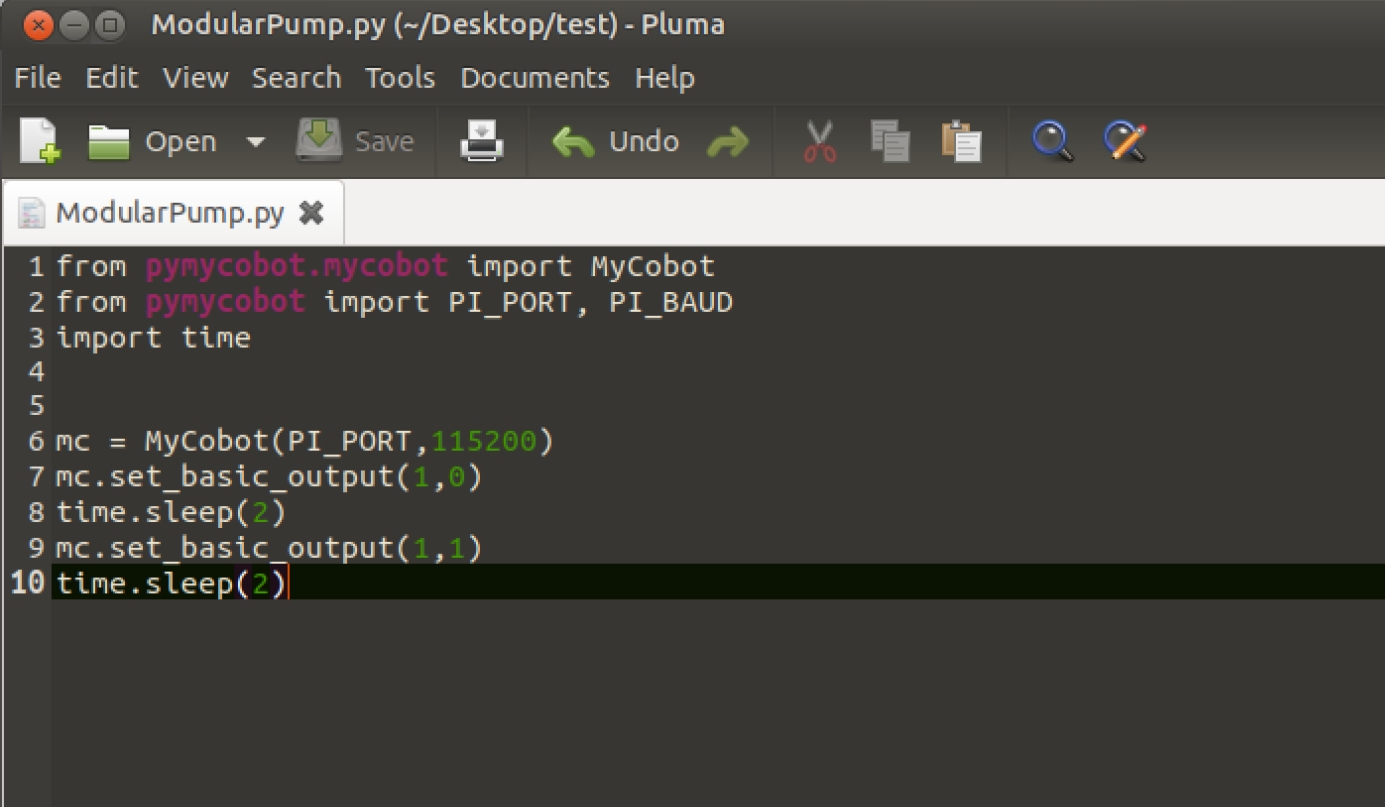
The code is as follows:
- Pi Version:
from pymycobot import MyCobot320 from pymycobot import PI_PORT, PI_BAUD # When using the Raspberry Pi version of mycobot, these two variables can be referenced for MyCobot280 initialisation import time # Initialise a MyCobot280 object mc = MyCobot320(PI_PORT, 115200) # Controls suction cup closed-open: # Use suction cup status interface 0 for open, 1 for closed mc.set_basic_output(1, 0) time.sleep(2) mc.set_basic_output(1, 1) time.sleep(2) # Check out the python API for details on how to use the interface.Save the file and close it, and open a command-line terminal by right-clicking on an empty space in the folder.
Input:
python ModularPump.py
You can see that the suction cup is closed-open